Model-based Multiple Object Tracking Using Capacitive Proximity Sensors
Published:
From Oct. 2018 to March. 2019, I was with M.Sc. Hosam Alagi and Prof. Dr.-Ing Bjoern Hein to develop an object tracking method on capacitive proximity sensor.

Published:
From Oct. 2018 to March. 2019, I was with M.Sc. Hosam Alagi and Prof. Dr.-Ing Bjoern Hein to develop an object tracking method on capacitive proximity sensor.
Published:
From Apr. 2019 to Aug. 2019, I was with other two master students to develop one LiDAR based multiple extended object tracking framework with UKF filter at Intelligent Sensor-Actuator-System (ISAS). And the motion and observation models are learned from training examples using Gaussian Process(GP). 
Published:
From Nov. 2018 to Dez. 2019, I was the student assistant at Institute for Anthropomatics and Robotics (IAR) - Intelligent Process Automation (IPR) with Prof.Dr.-Ing Torsten Kroeger and M.Sc. Woo-Jeong Baek, where we focused on the safe interaction between robotics and human and safety sensor configuration. 
Published:
From Nov.2019 to June.2020 I am working with Prof. Dr.-Ing. Gert F. Trommer and M.Sc. Christopher Doer to develop a Thermal-Inertial Odometry framework to enable stable and robust motion estimation in the visually-degraded environment, like dark evening. 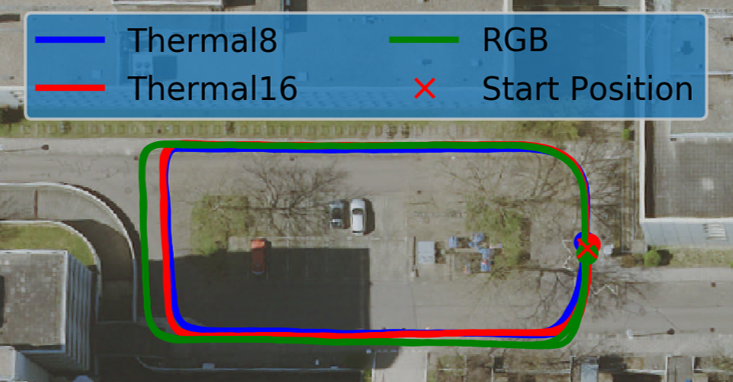
Published:
This repository implements an all-in-one and ready-to-use LiDAR-inertial odometry system for Livox LiDAR.
<img src=’/images/project/pjlab_multi_bag.gif’ style=’zoom:40%;>