
LiDAR-based Extended Object Tracking and Segmentation
Published:
Motivation
For filter-based tracking algorithm, the key components are the prediction and observation models, which probabilistically describe the temporal evolution of the process and the measurements respectively. The parameters and noise components of the models can be estimated from training data or tuned manually. Even though such parametric models are very efficient, their predictive capabilities are limited because they often ignore hard to model aspects of the process.
In this project, we present Gaussian Processes (GP) could be one enhancement of parametric prediction and observation for Bayes filters. To be more specific, we introduce one GP-UKF where the prediction model is learned with GP. Later on, we discussed the possibility of sensor denoise with GP.
Model Overview
Our model consists of three main components: sensor pre-processing, observation model and one motion model, as shown in Picture below: 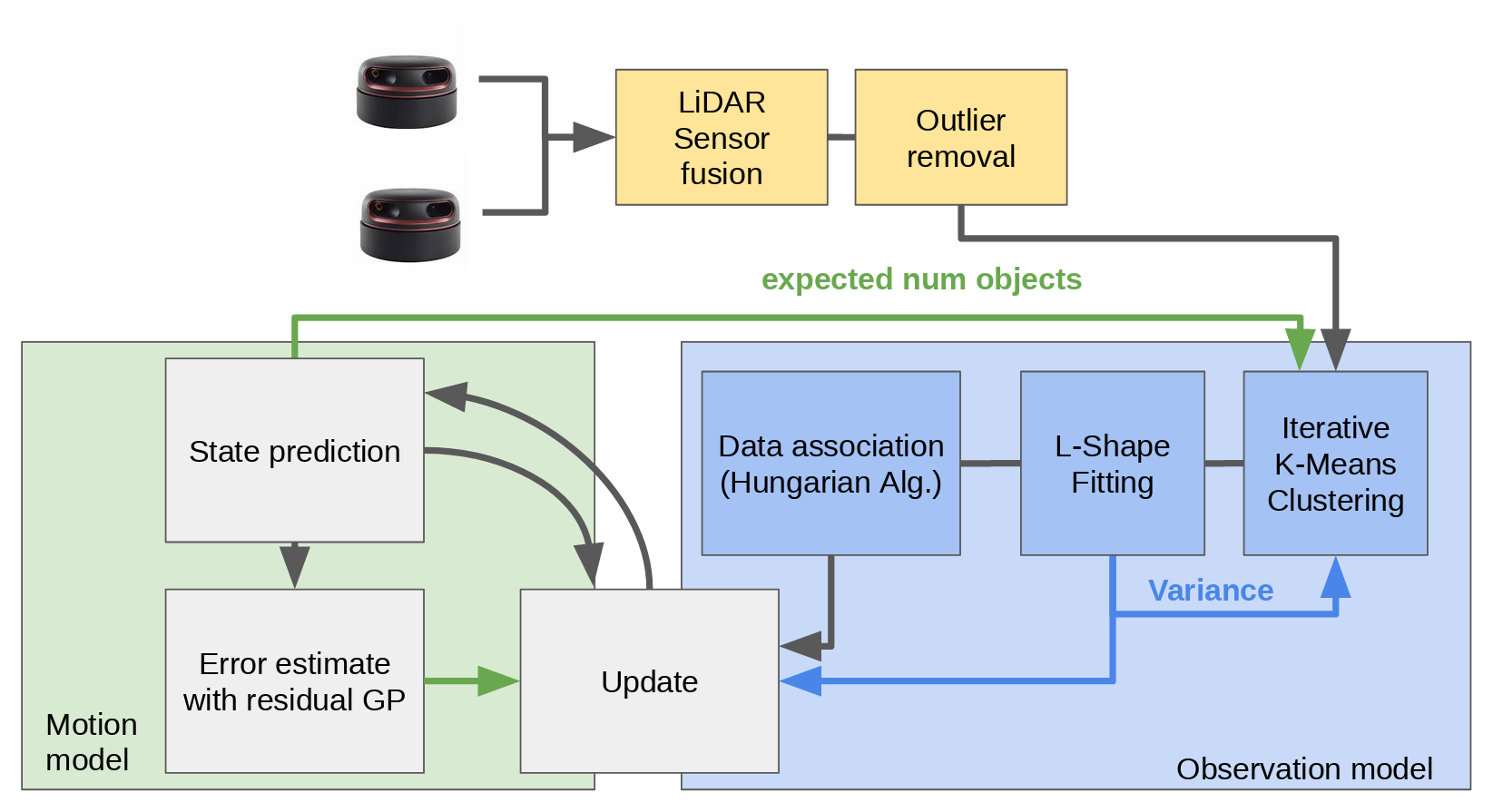 The state vector is represented as: \(x = [x,y,sin(theta), cos(theta), length, width]\)
The state vector is represented as: \(x = [x,y,sin(theta), cos(theta), length, width]\)
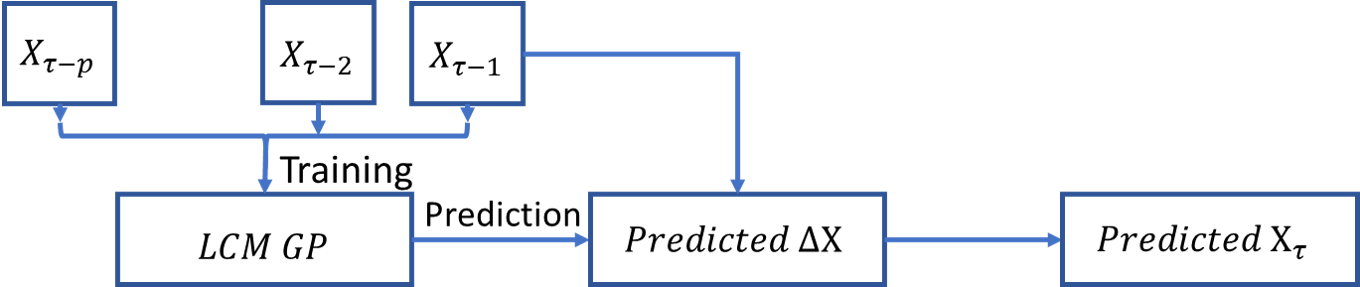
GP Motion Prediction
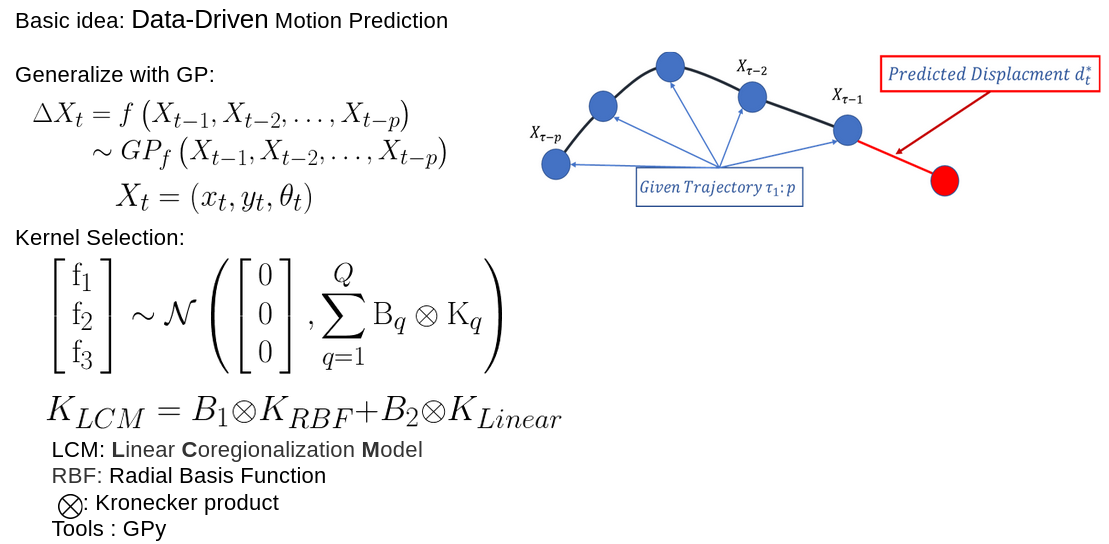 Advantage:
Advantage:
- Process Noise learned from the training data.
- Noise model automatically adapt to the system state
LiDAR noise learned with GP

Result
Simulation
Real World
You can see Demo here.